Esta es la primera entrega de una serie (espero) de ellas sobre cómo hackear un coche teledirigido y ponerle todos los sensores y cacharros que se nos ocurran.
Por supuesto, empezaremos por el principio: cómo hacer que el coche sea autónomo a través de un Arduino. El elegido en este caso es el Arduino Leonardo, pero vale casi cualquier otro.
Materiales necesarios:
- Un coche teledirigido baratillo, de los chinos mismo
- Una placa Arduino
- Cuatro resistencias (yo usé de 1K, pero valen de un valor +-50%)
- Estaño
- Funda termoretráctil
- Varios cables de colores (a poder ser) de unos 20cm
- Una batería de 9V
Herramientas necesarias:
- Estañador
- Destornillador
- Pelacables (o una navaja, en su defecto)
- Alicates de corte diagonal
- Desoldador de estaño (no imprescindible, pero sí recomendable)
Pasos a seguir:
1. Desmonta el coche


2. Desatornilla la placa
3. Elimina el circuito integrado, ya que no lo necesitaremos para nada. Para ello tienes dos opciones:
a) Consigues calentar el estaño de sus patitas y lo sacas como Dios manda o...
b) Con los alicates le cortas las patitas por la parte de arriba y lo sacas con unas pinzas. Yo me he decidido por esta segunda opción. ;)

Éste es el aspecto que mostrará cuando las hayas cortado todas:

4. Prepara las resistencias
Lo que vamos a hacer ahora es proteger nuestra placa, por lo que vamos a coger las cuatro resistencias que tenemos (en mi caso de 1K, pero ya digo que el valor no es crítico, pueden ir desde 0,5K a 1,5K) y cuatro cables de colores de unos 10cm de largo, y los vamos a unir formando binomios resistencia-cable:
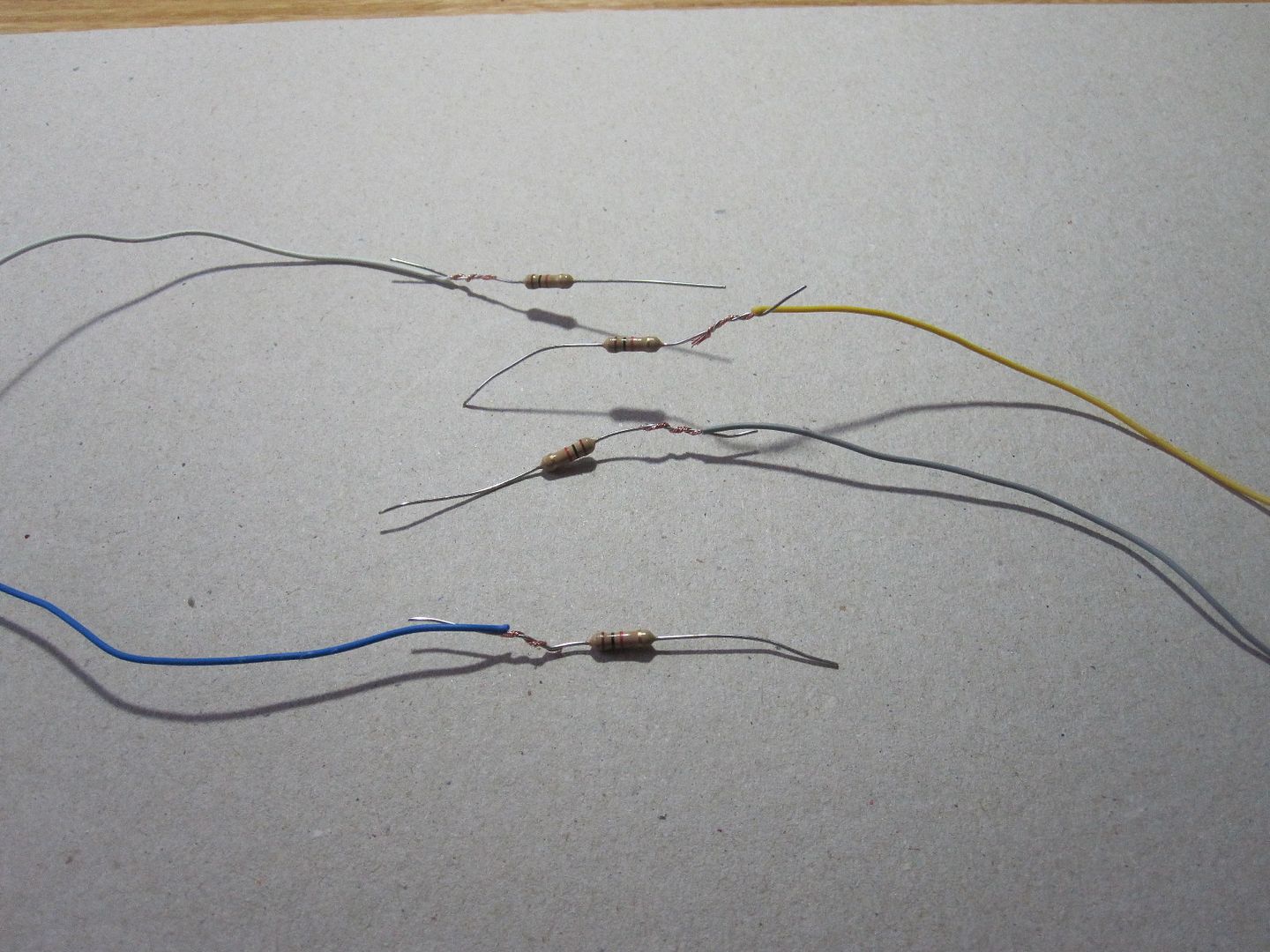
Cuando ya tengas las parejas hechas, consolida la unión con estaño.

Las cuatro parejas tendrán este aspecto:

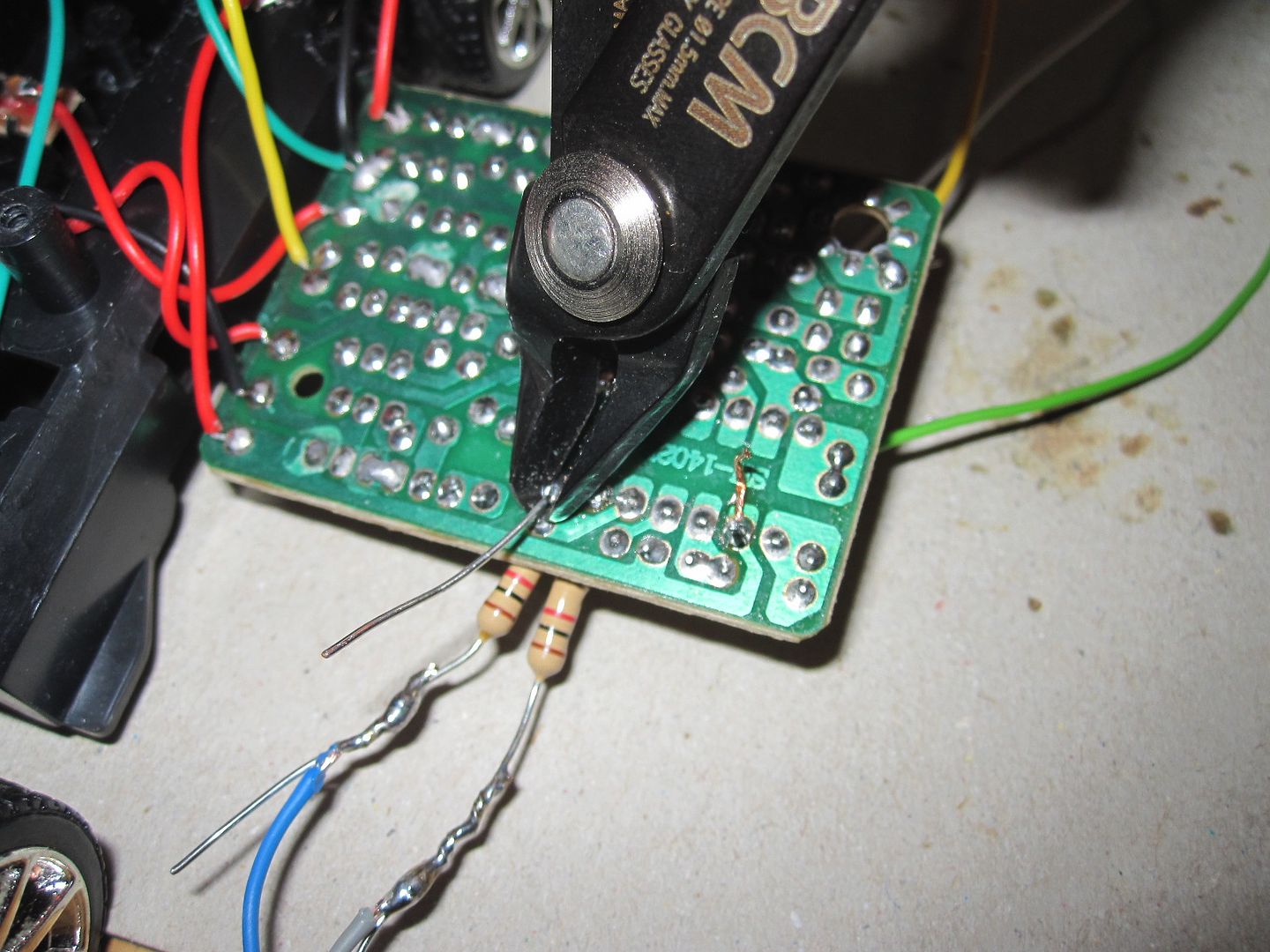
Elimina el trozo sobrante con los alicates de corte.
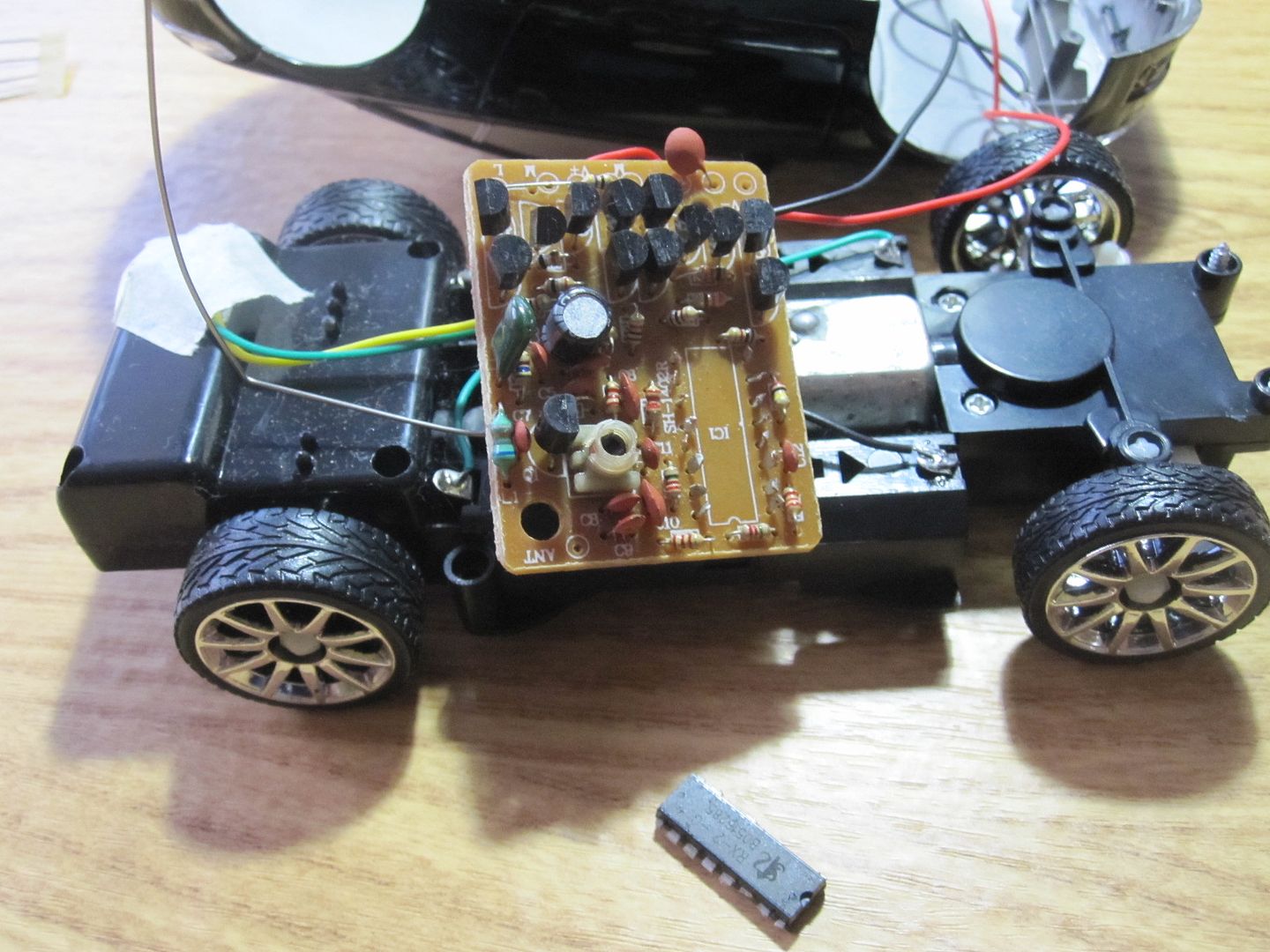
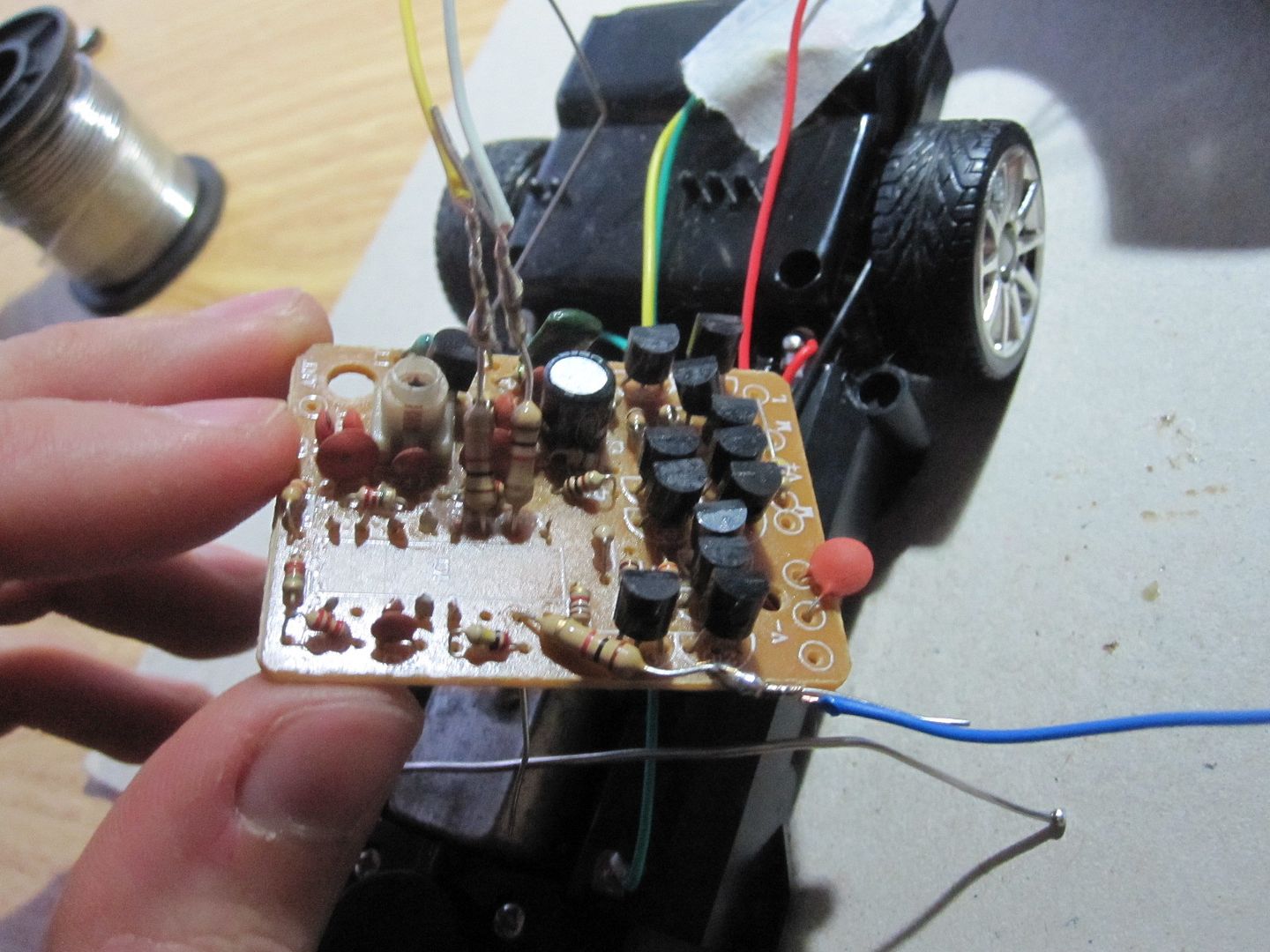
5. Estudia el circuito integrado que desechaste
Fíjate en las letras impresas que tiene encima para poder Googlearlo. Si has comprado un coche en un chino o en algún sitio por el estilo, seguramente tendrás un integrado como este:
http://jumpjack.altervista.org/digitalrome/progetti/macchinina/TX-2C%28RX-2C%29AY.pdfLo que se trata es de buscar a qué corresponde cada pata del integrado para poder controlar nosotros a voluntad el coche. Fïjate que en este pdf aparecen tanto las especificaciones del transmisor (el que está en el mando), como del receptor (que es el que nos interesa). Los pines que estamos buscando son los correspondientes a:
- Tierra (GND)
- Derecha (RIGHT)
- Izquierda (LEFT)
- Marcha atrás (BACKWARD)
- Hacia delante (FORWARD)
En mi caso, se trata de los pines 2, 6, 7, 10 y 11.
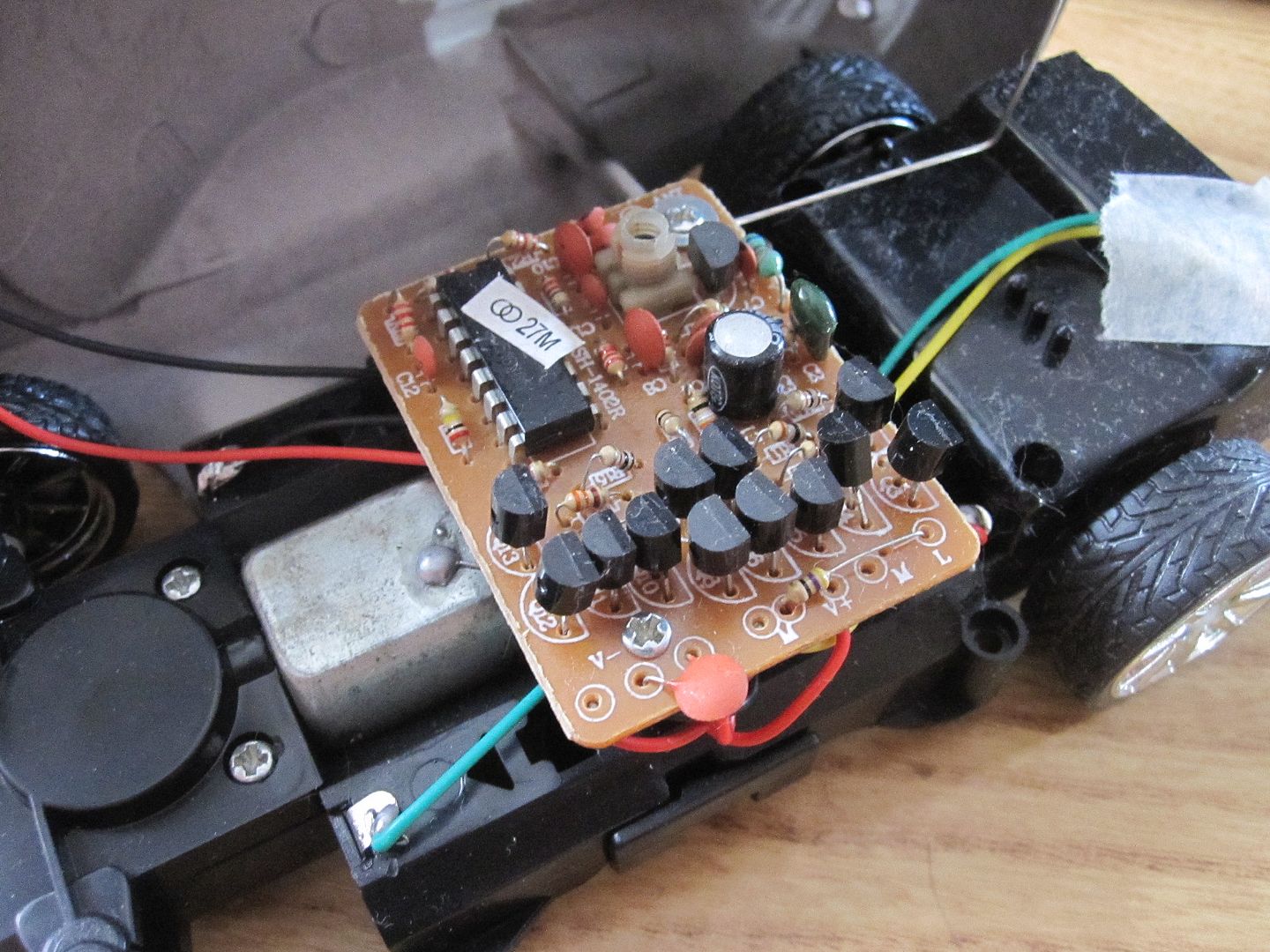
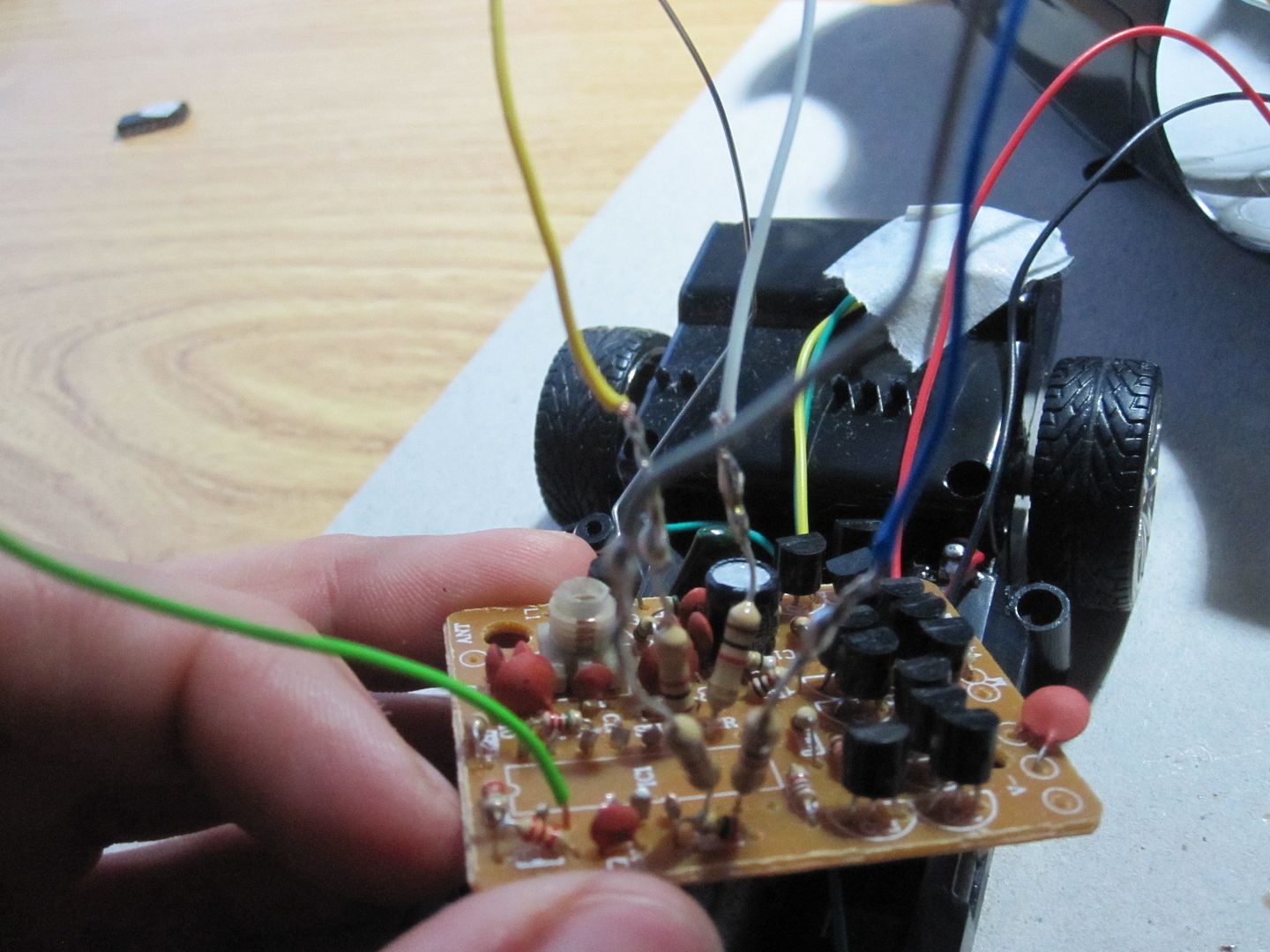
6. Introduce las parejas que preparaste y el quinto cable en los pines que has identificado
Lo que tienes que hacer ahora es, con ayuda del estañador y el desoldador, eliminar las patitas correspondientes a esos pines para poder introducir las resistencias por los agujeros. Procura limpiar bien la zona con el desoldador para que sea más fácil introducir la pata de la resistencia, aunque ya te digo que yo no tenía y no me costó excesivo trabajo dejar la zona presentable).
A continuación, introduce las cuatro resistencias por los pines correspondientes a las dos marchas y a los lados izquierdo y derecho de la siguiente manera:
Puedes observar que la resistencia queda hacia el lado de arriba, y cómo están limpios y preparados el resto de agujeros. Éste es el aspecto que tiene por debajo:
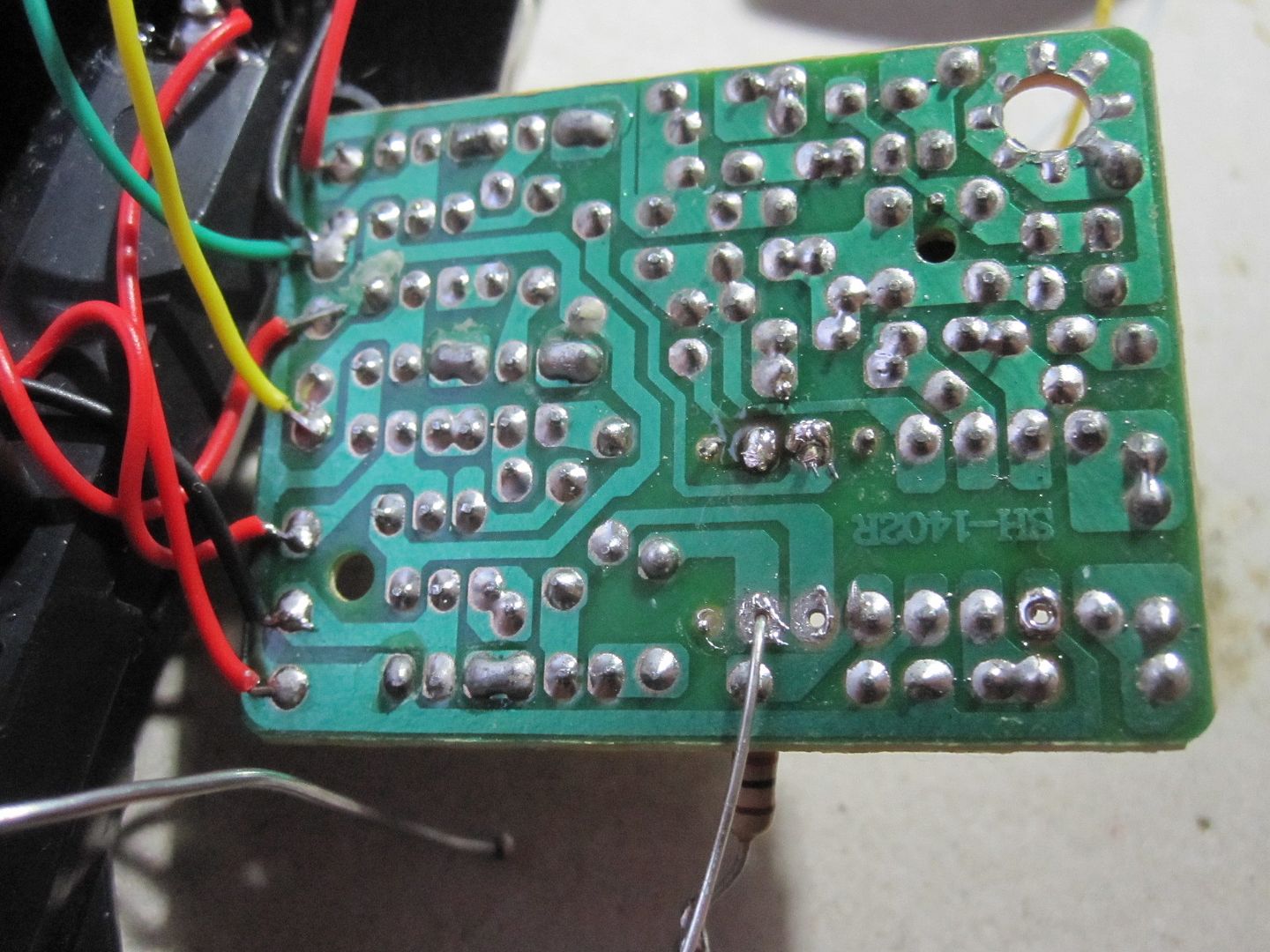
Una vez introduzcas las cuatro resistencias y el quinto cable que tenías apartado, pero aun no habías usado (es el que va en la patilla de GND, efectivamente), estaña los cinco pines y corta el sobrante tanto de las resistencias como del cable de tierra que te sobrará.
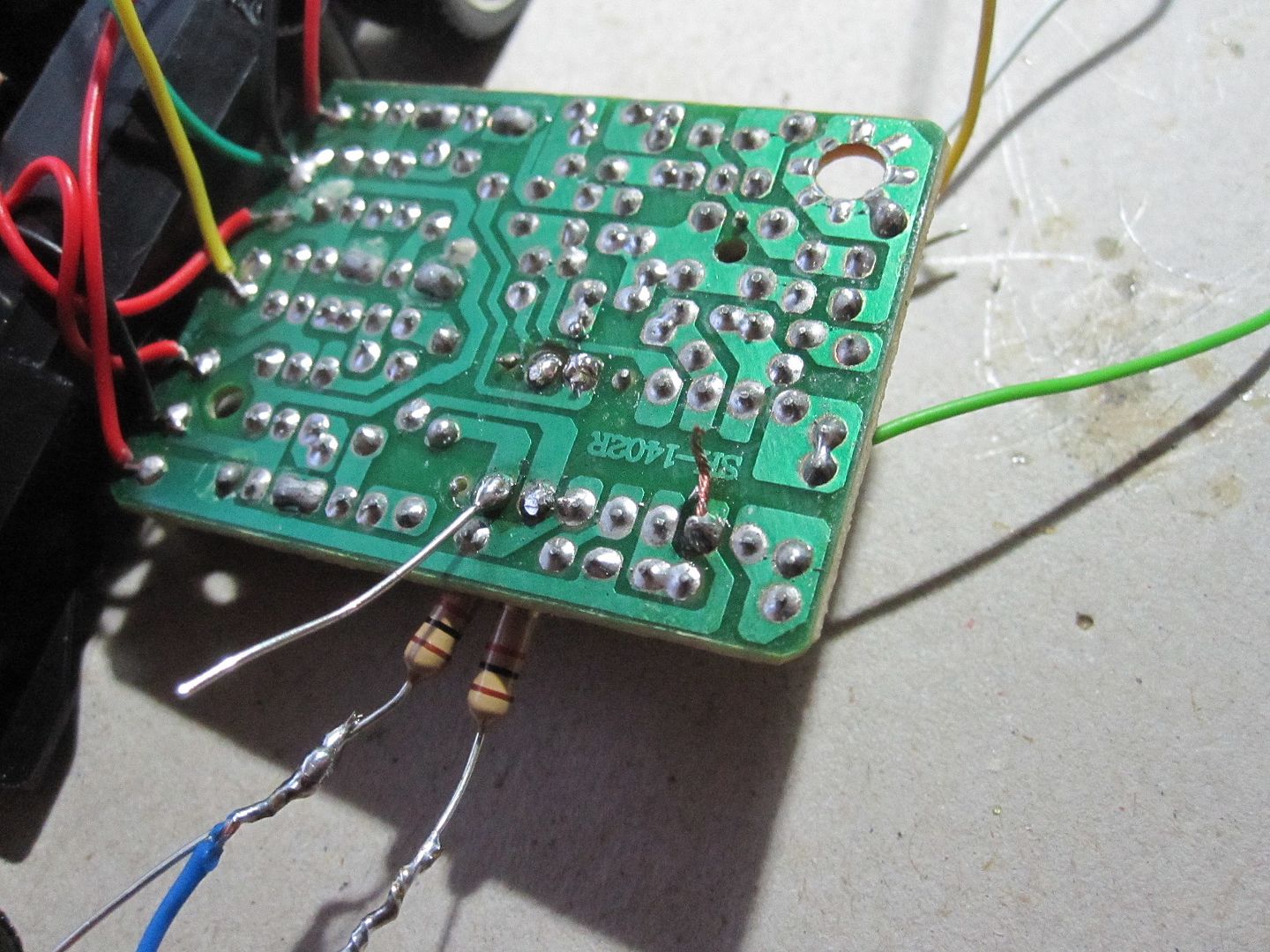
Éste es el aspecto que tendrá tu placa entonces:
7. Protegiendo tu placa
Lo que vas a hacer ahora es proteger esas parejas que hemos introducido con la funda termoretráctil. Para ello corta en varios trozos la funda de tal manera que cada trozo cubra totalmente la resistencia, el trozo estañado y un poco del cable. Unos 10-15 cm, vamos. Y como bien dice su nombre, aplícale calor para que se retraiga y se moldee según la resistencia y el cable. Puedes usar desde un mechero o una cerilla a un secador de pelo. Tú mismo. El objetivo es darle un mejor acabado a las conexiones eléctricas y dotar de protección mecánica y anti-abrasiva a los cables y demás componentes eléctricos.
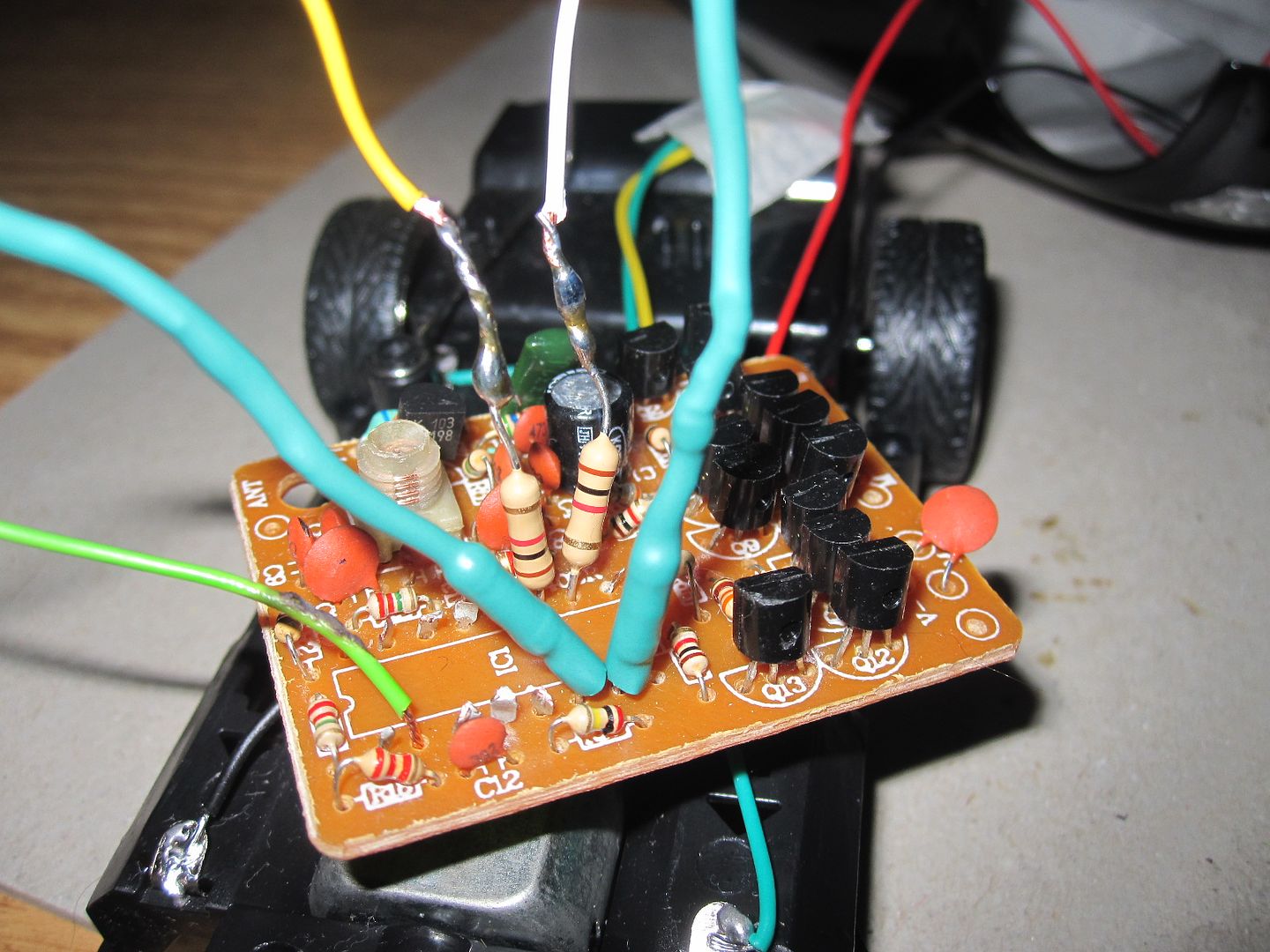
Éste será el aspecto que tendrá finalmente tu placa.
8. Preparando el Arduino
Si no lo has hecho antes, ahora es el momento de anotar a qué color corresponde cada pin. Puedes hacer una tabla como la siguiente (la que resultó en mi caso):
PIN COLOR FUNCIÓN2 Verde GND
6 Gris Derecha
7 Azul Izquierda
10 Blanco Marcha atrás
11 Amarillo Adelante
El código que vamos a preparar es muy sencillo, ya que únicamente se trata de verificar las cuatro funciones: las dos direcciones marcha atrás y adelante, y los dos lados izquierda y derecha. Se trata del siguiente:
[sourcecode language="c"]
/*
Probando las cuatro órdenes del coche
*/
int forward = 12; // Forward pin
int reverse = 11; // Reverse pin
int left = 10; // Left pin
int right = 9; // Right pin
void setup() // Configuración de los pines como salidas
{
pinMode(forward, OUTPUT);
pinMode(reverse, OUTPUT);
pinMode(left, OUTPUT);
pinMode(right, OUTPUT);
}
void go_forward()
{
digitalWrite(forward,HIGH); // Da la orden de adelante
digitalWrite(reverse,LOW); // Apaga la orden de marcha atrás
}
void go_reverse()
{
digitalWrite(reverse,HIGH); // Da la orden de marcha atrás
digitalWrite(forward,LOW); // Apaga la orden de adelante
}
void stop_car()
{
digitalWrite(reverse,LOW); // Apaga todas las órdenes
digitalWrite(forward,LOW);
digitalWrite(left,LOW);
digitalWrite(right,LOW);
}
void go_left()
{
digitalWrite(left,HIGH); // Da la orden de izquierda
digitalWrite(right,LOW); // Quita la orden de derecha
}
void go_right()
{
digitalWrite(right,HIGH); // Da la orden de derecha
digitalWrite(left,LOW); // Quita la orden de izquierda
}
void loop()
{
go_forward();
go_left();
delay(500);
stop_car();
delay(500);
go_reverse();
go_left();
delay(500);
stop_car();
delay(500);
go_forward();
go_right();
delay(500);
stop_car();
delay(500);
go_reverse();
go_right();
delay(500);
stop_car();
delay(500);
}
[/sourcecode]
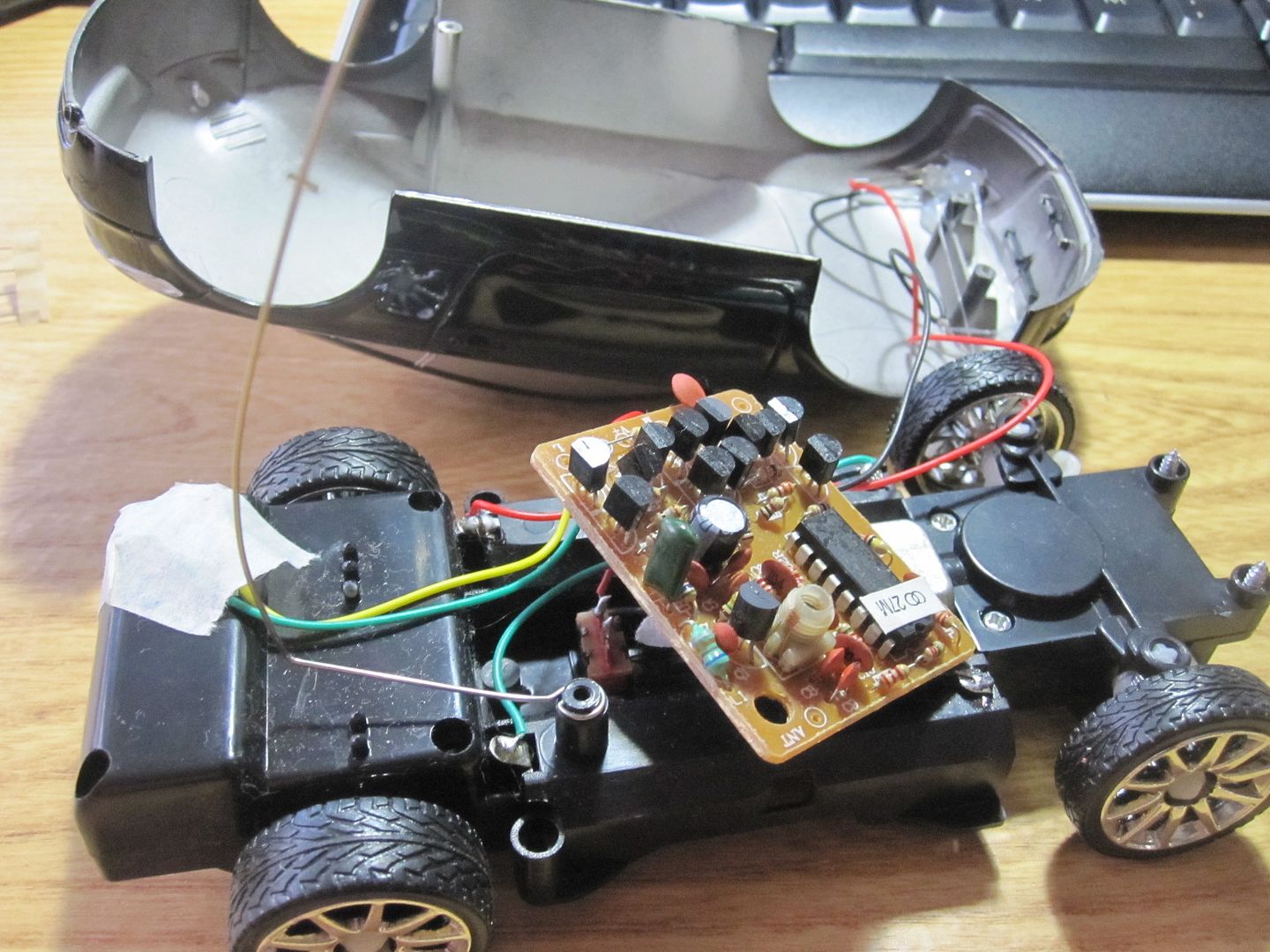
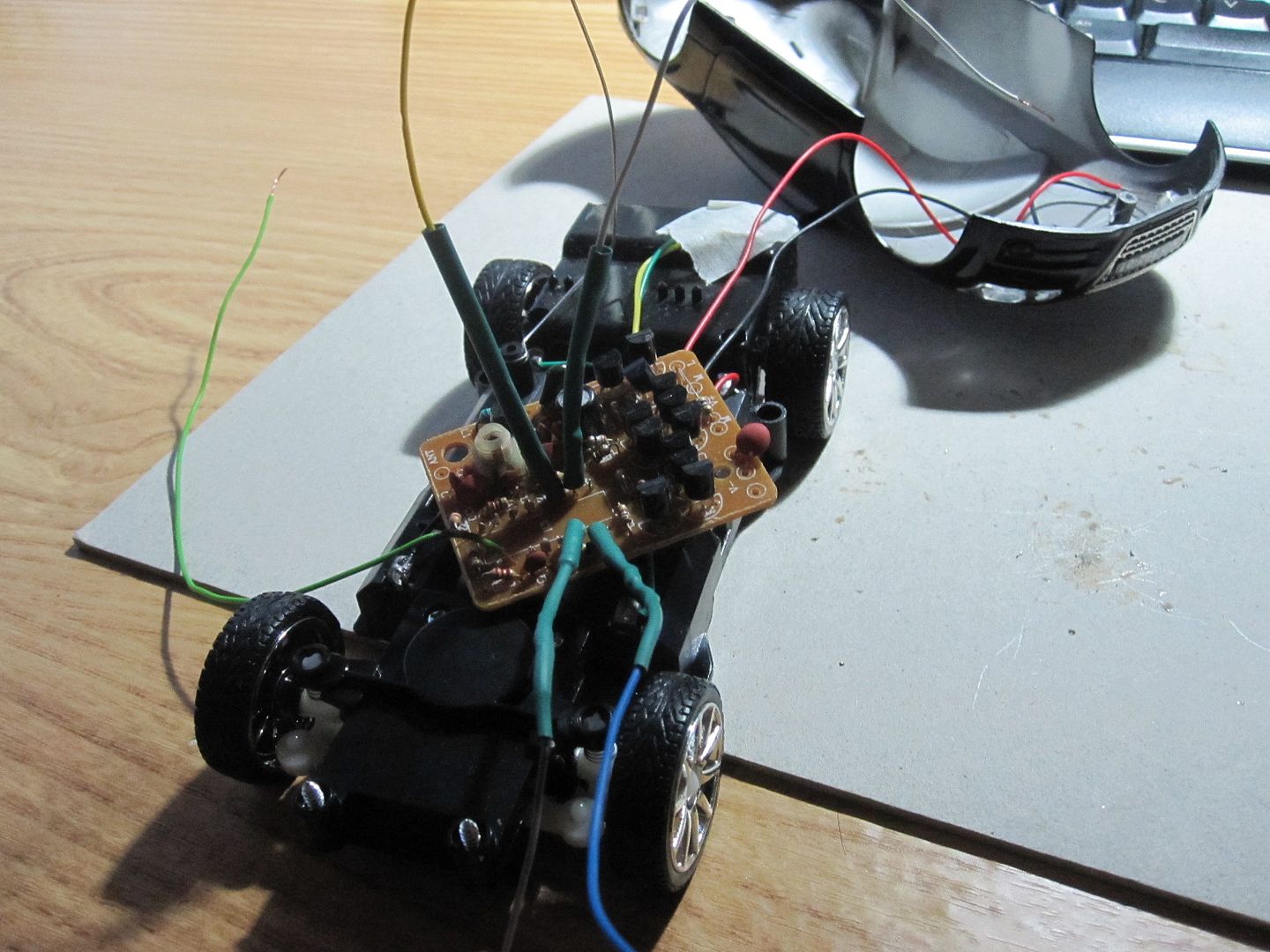
9. Conectando y probando el Arduino
Y por fin llega el último paso: donde por fin pruebas si todo esto funciona. Elimina la antena del coche si no lo has hecho ya (obviamente, no nos hará falta) y atornilla la placa con los tornillos que quitaste en el paso 2.
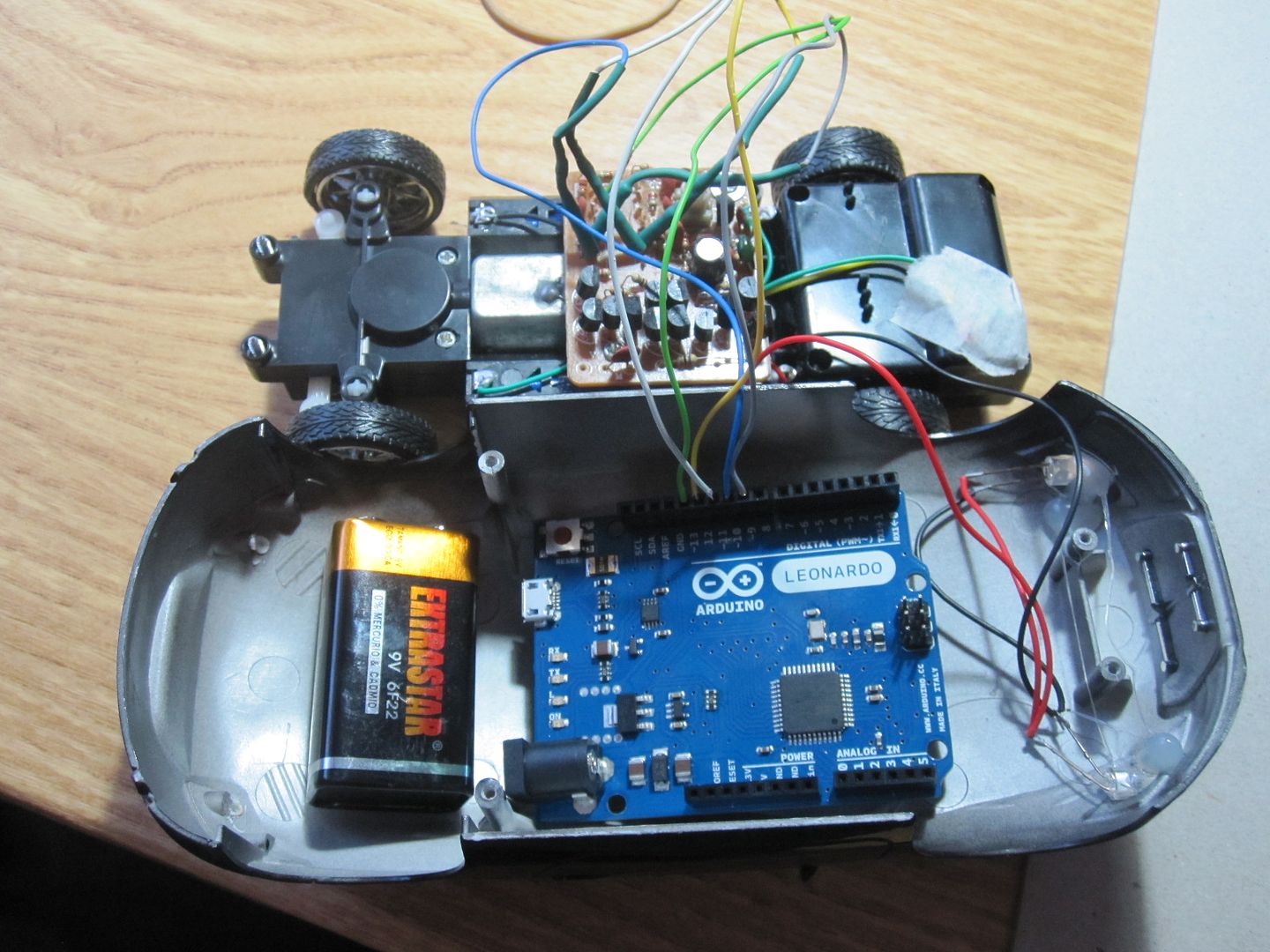
Conecta los cables según los pines que has declarado en el programa (en mi caso del 9 al 12) y los colores que anotaste antes. El color de tierra lo llevarás al GND de la placa, que como ves en la foto, está junto a los otros cuatro cables (en mi caso, repito):
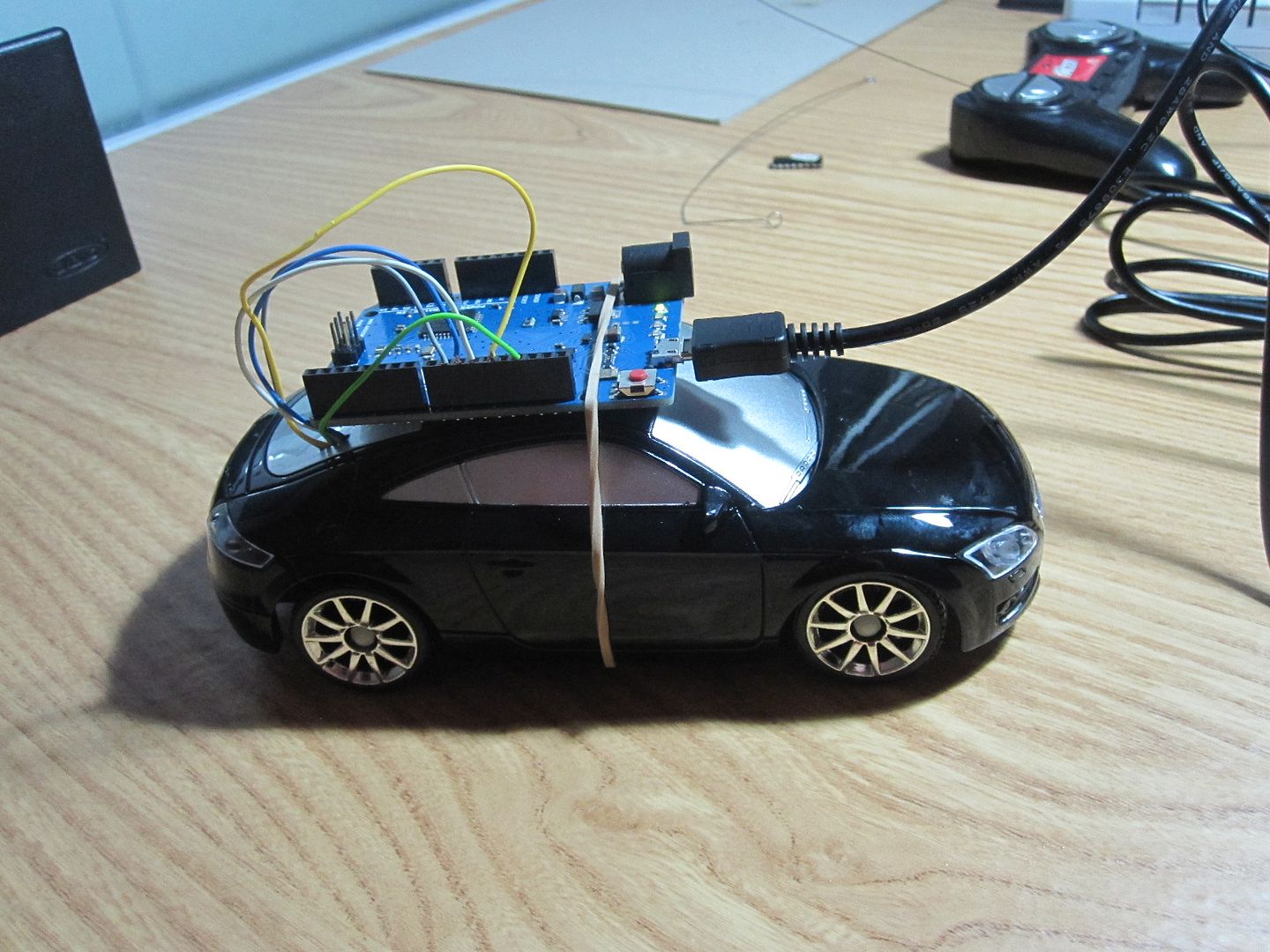
Para realizar las pruebas de código, o variaciones, te recomiendo que aun no alimentes la placa con una batería, de tal manera que tendrás que tener la placa accesible al USB. Puedes volver a montar el coche y sujetar la placa con una goma elástica, como en mi caso, o dejarlo ya desmontado para introducir la placa y la batería dentro. Ahí según tu elección.
10. Alimentando la placa
Tan sólo falta el toque final: hacer el coche totalmente autónomo. Con el código ya probado ya sabes que se mueve solo, así que sólo falta el tema de la alimentación. Para ello puedes usar una batería normal de 9V, como esta:

Puedes fijarla tanto en el propio chasis del coche (si tienes sitio), como en la carrocería (algo como esto):
La conexión la puedes realizar con un enchufe centro-positivo en el conector de alimentación de la placa, o con unos simples cables como los ya empleados, insertándolos en los pines GND y Vin del conector POWER de la placa. Según tengas el adaptador o no.
El resultado será algo como esto:
[youtube http://www.youtube.com/watch?v=ulftGvqm1LU]
Espero que te haya resultado divertido. Si tienes cualquier pregunta o duda, estamos aquí para ayudarte.
Un saludo y nos vemos en la siguiente entrega! :D
 UPDATE 3]
UPDATE 3] Pandaboard and Raspberry Pi[/caption]
Pandaboard and Raspberry Pi[/caption] HexaWheels_01[/caption]
HexaWheels_01[/caption] [/caption]
[/caption] 01_Hello_World_CM-510[/caption]
01_Hello_World_CM-510[/caption]
 Controlador CM-510[/caption]
Controlador CM-510[/caption] tabla y puerta or[/caption]
tabla y puerta or[/caption] tabla y puerta and[/caption]
tabla y puerta and[/caption] 01_Hola_Mundo_Salida_RoboPlus_Terminal[/caption]
01_Hola_Mundo_Salida_RoboPlus_Terminal[/caption]

 Programming Bioloid: choose hardware, firmware and languages[/caption]
Programming Bioloid: choose hardware, firmware and languages[/caption]